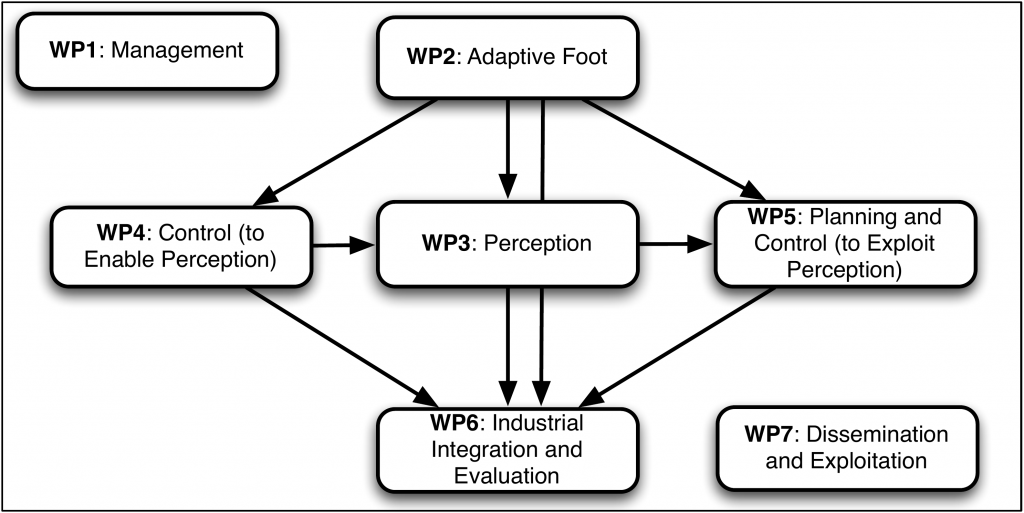
The project is divided into seven work packages (WP),
WP1: Management, will be responsible for the overall leadership, organisation, and administration of the project.
WP2: Adaptive Foot focuses on the hardware design and integration of the proposed adaptive foot/ankle system for the platform.
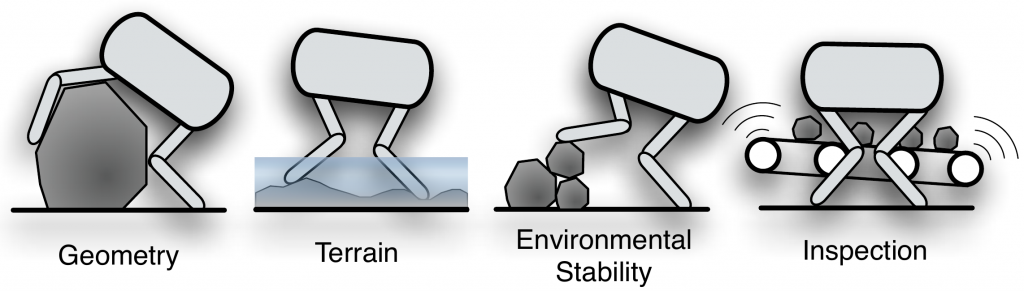
WP3: Perception lies at the core of the project, and will address the algorithms and methods to enable the four types of sensory awareness. Integrates the use of haptics in perception of ego-motion (state estimation) and for localisation and mapping.
WP4: Control for Perception contains the modelling and control tasks necessary to enable such perception. This includes modelling the dynamics of the robot and foot, balance, locomotion, and impedance control.
WP5: Planning and Control to Exploit Perception addresses the action available to the robot with enhanced perceptual capability.
WP6: Industrial Integration and Evaluation is focused on evaluating our outputs while undertaking practical inspection tasks in real-life extreme domains including a copper mine and sewage tunnels.
WP7: Dissemination and Exploitation will manage external engagement and commercial exploitation of our outputs.